快把你家的灯接入HomeKit吧其二(舵机篇)
上一篇文章中已经熟悉了如何烧录程序到ESP32,并且成功的点亮了一盏LED灯,如果你动手能力强的话。
那么上一节就是教会了你做了一个支持HomeKit的灯。
本篇会将上一篇中的LED替换成一个舵机。至于为什么使用舵机,是因为我不想破坏开关的原有结构,想使用一种非侵入式的方法去拓展现有的灯开关。
重新启用环境变量
如果你看完上一篇文章后重启了电脑,或者关闭了子系统,那么就得重新配置一下ESP-IDF的环境变量,也可能还需要重新将设备挂载到子系统上。
使用命令
1 | . $HOME/esp/esp-idf/export.sh |
即可
控制舵机
0x01 控制信号
要想控制舵机,就得发送正确的指令。我使用的舵机长这个样子:
信号频率为50Hz.所谓的指令就是每个周期内,高电平脉冲的持续时间(宽度/长度)。
视频中红色为实际信号,可以看到,随着高电平的持续时间变长,舵机的角度也越来越大。
| 持续时间 | 对应角度 |
|---|---|
| 0.50ms | 0° |
| 1.50ms | 90° |
| 2.50ms | 180° |
0x02控制相关代码
对于这种由脉冲信号控制的舵机,可以使用PWM来进行控制。查阅官方的指南,可以很容易的找到相关例子,甚至直接有现成的Demo可以使用(不得不说官方的例子真的很详细)。
好了,这下子也不用自己写了(还好不用,不然就得用for循环+延时,手动的凑出脉冲信号来控制了)
直接到mcpwm_servo_control_example.c。
复制或者下载即可,为了方便,可以复制到上一篇文章中的led.c中去,不过要记得先把之前所有的内容注释掉,因为以后还要使用到那些代码。
其中
1 |
需要修改一下,依据我的舵机参数,将其修改为
1 |
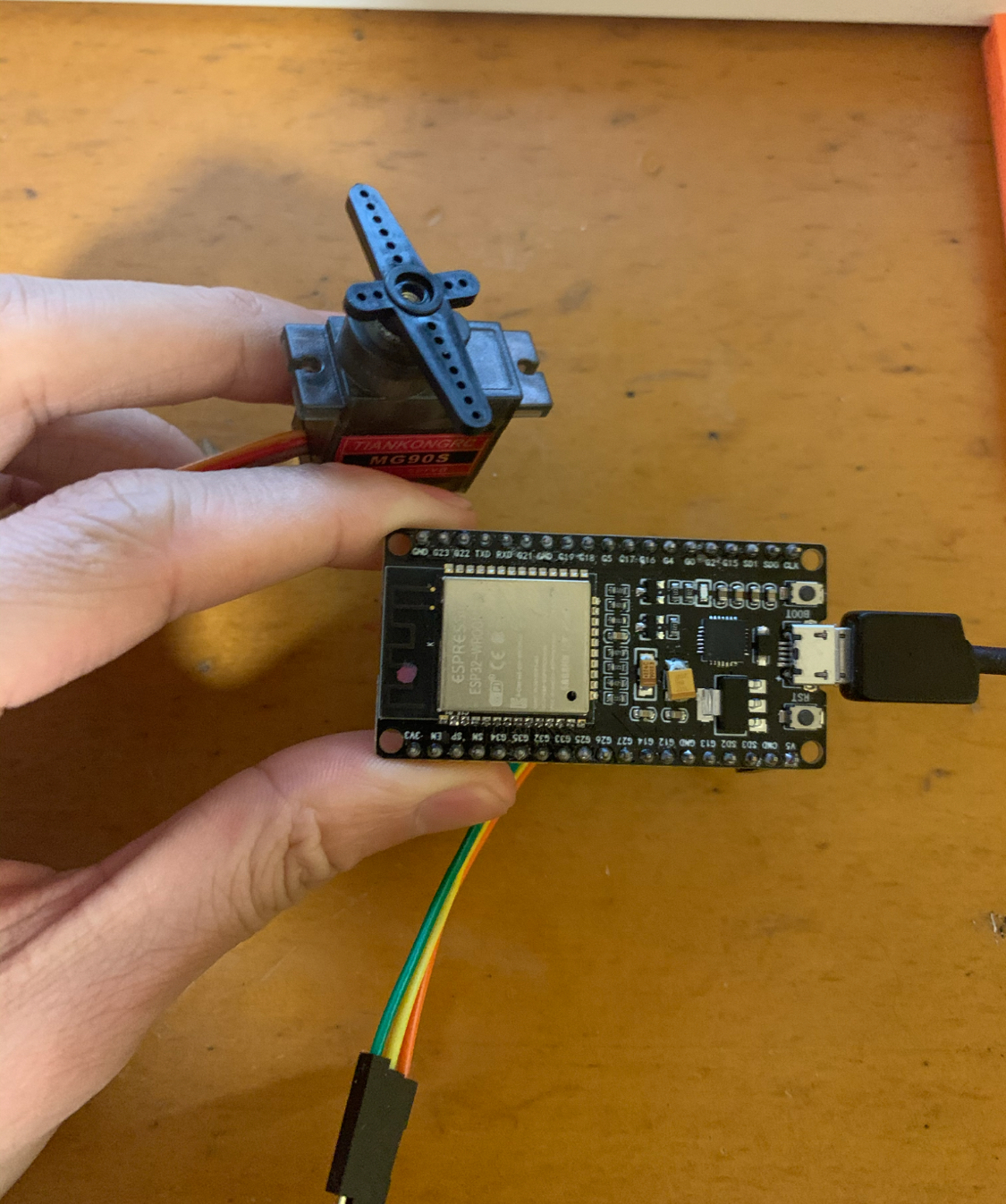
又因为我的板子没有引出18号引脚,所以还是修改为上篇文章中的2号引脚吧
1 | static void mcpwm_example_gpio_initialize(void) |
改为
1 | static void mcpwm_example_gpio_initialize(void) |
0x03 烧录进去吧
烧录过程没什么好说的,就是和之前大差不差。
编译好项目以后
1 | make -C examples/esp32/led all |
先进行earse_flash
1 | make -C examples/esp32/led erase_flash |
再进行flash。
1 | make -C examples/esp32/led flash |
0x04 看看效果吧
由于烧录进去的代码只是为了控制舵机,所以是无法被添加到HomeKit里面的。
当烧录完成后,舵机就会缓慢的从0度转到180度,然后快速的回到0度,再次从0度转到180度,然后无限循环。
注:
控制具体转到多少度的代码如下,建议眼熟一下,下篇文章会用到。
1 | // 先计算出目标角度对应的高电平持续时间 |
下期预告:快把你家的灯接入HomeKit吧其三(整合篇)
参考资料: